人間の作業を代行するだけでなく
自律的に活動できるロボットとして
介護医療の現場で職員や介護対象者を助けるロボットというと、どのような役割が思い浮かぶでしょうか。往々にしてロボットに人を助けるための機能を付けて、あくまで人のサポートを行う、作業を代行してもらうというイメージが湧いてきますが、「人間と機械の共生」を研究の大きなテーマとする神奈川工科大学の三枝亮先生が描くビジョンはそれとは少し異なります。
「単なる人間の道具として機械が存在するのではなく、人間と機械が共生するという状況をつくり出すには、人間と機械がそれぞれ影響し合い、より高め合うという関係性が求められます。現在のように人間が機械に物事を教えるだけでなく、機械から人間が物事を学んでいく未来を描いていく。それによって人間は次のステージへと進歩し、社会はより豊かなものになるだろうと考えています」
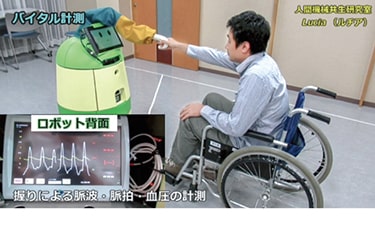
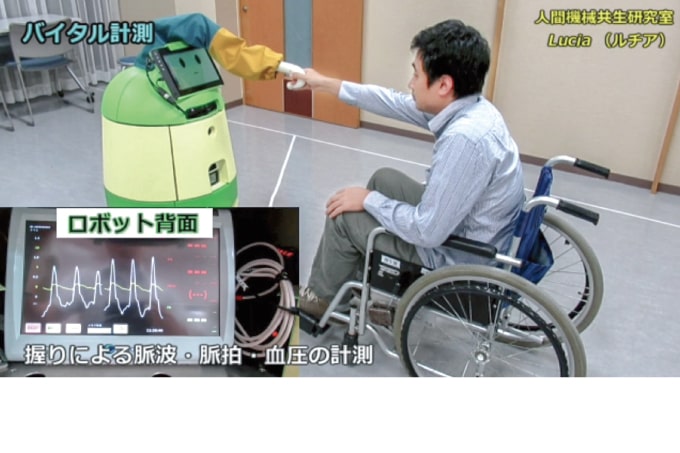
三枝先生が手掛ける介護医療コンシェルジュロボットは、夜間には施設内や居室を巡回して施設全体を見守り、昼間には介護対象者の近くに寄り添い声をかけながら、手を繋いでバイタルサインを計測しつつ、リハビリの支援をする。従来の単純な移動巡回や薬物搬送を行うロボットとは違い、自律性が高く、対人的な応答性を備えたことによる高いコミュニケーション力が大きな特徴となっています。
「現場の業務負担をより効果的に軽減すること、介護対象者の日常を活性化して生活の質を向上させることが目的です。そのためには、ロボットはこれまでの『道具』という枠を越えて、人間から教わることに加えて自律的に学ぶこと、そして人間に対して何かを教えていける存在になることが必要だったのです」など世界のさまざまな課題解決に役立てられる日を願いながら、今日もこつこつと、研究を進めています。
多面的に介護医療を支援する
コンシェルジュロボットの機能
三枝先生が手掛ける介護医療コンシェルジュロボットの研究開発は、3つの大学、1つの研究所、9つの企業、5つの施設、1つの省庁が関わる非常に大規模な産学官連携のプロジェクトであり、研究はターゲットによる切り分けを軸に、大きく3つのテーマが存在しています。
ひとつめが「バリアフリーな見守りロボットの開発」。これは介護医療コンシェルジュロボットのベースとも言えるもので、日本で初めて接触を感知する柔軟外装で全体を覆ったロボットを開発。この技術は国際特許を取得しています。
柔軟外装を使用することで、高齢者、障がい者、子供でも安心して触ることができ、「声かけ」「付き添い」「触れ合い」といったコミュニケーションを通して、機械に対して人がより親しみを持つことができます。また、ロボットには3次元熱点群計測が設置され、暗い夜間の巡回でも、人の有無や姿勢を検知することが可能。たとえば廊下で倒れている人を発見した際には、呼吸の有無や安定性を認識して、職員にアラートを発信する仕組みです。巡回で検知した状況や施設利用者へ声かけを行った情報等はデータとして職員に共有され、ロボットは自律的にステーションに帰還し充電を行います。
2つめのテーマが「口腔、顔部、顎部で操作できるインターフェースの開発」。これはベッドからの移動が困難な人や脊髄損傷者などを対象としたもので、自分の代わりにロボットが病室外で活動し、他の人や職員とのコミュニケーションを実現するもの。身体が動かない人のためのリアルなアバター・キャラクター、というとイメージがしやすいかもしれません。これにより身体が動かない人でも病室外へと行動領域が広がり、活動意欲が高まって、日常生活が活性化する効果が見込まれます。
ロボットの操作は舌などの口腔や顎だけで行うことができ、ロボットに設置されたモニターに表示される表情や音声を使って、利用者は外部に意志を伝達します。一方ロボットは利用者の操作だけでなく、深層学習で周辺の人や物を認知し、方位や距離を触覚に変換して利用者に伝達。また利用者の知覚操作と自律制御のバランスを深層学習することで、使用するほどによりスムーズな操作を実現していきます。なお病室内にいるときには、ベッド周辺に設置する検知装置を活用した利用者を見守る役割を担当。職員の連絡を仲介する役割も担い、職員が病室まで足を運ばなくても介護対象者とコミュニケーションを図ることが可能となります。

人間のリハビリを機械が指導し
施設全体の健康管理を機械が行う
そして3つめのテーマが「触れるだけでバイタルサインが計測できる多自由度駆動アームの開発」。これは介護対象者の健康状態を検知することを目的に、ロボットに設置したアームに触れることで、血圧や脈拍を計測できるもの。ロボットと手を繋ぎながら移動しているだけでバイタルのデータがいつの間にか計測され、職員に共有されるというイメージです。また健康状態の計測はこのアームに加え、深層学習による顔検出と温度計測でも行われ、ロボットは施設内を巡回する中ですれ違う利用者の顔を認識し、非接触で体温を計測。体温が高い利用者がいた場合にはその情報を職員に伝達します。
このアームは歩行訓練などのリハビリ支援にも使用され、利用者を手繋ぎで誘導するだけでなく、歩行特性を認識して異常性を検知する他、アームからの振動や映像、音響による刺激を利用者に与えることで、利用者の歩き方や姿勢をより良く改善していく機能も設置されています。そしてこのように取得された複数の利用者の健康状態や運動データは蓄積・共有され、結果として施設全体の健康管理に効果を発揮するのです。介護対象者に寄り添いながら見守る役割、身体の動かない人が病室外で活動するためのデバイス、リハビリ支援を行いながら施設全体の健康管理を行う存在という多くの役割をひとつで担う介護医療コンシェルジュロボットは、プロジェクト完了後に製品販売を開始し、市場の反応を分析している現状にあります。
「ロボットとセンサネットワークの強化や集積したデータをクラウドシステムで動的に分析する機能など、今後の改善点もありますが、一方で介護医療の現場でのロボットの必要性を社会的に認知してもらうことも大切です。現場の職員の方に私たちの取り組みを伝えたり、逆に意見をもらったりすること。社会と介護医療現場と開発研究の人たちが立場を越えて協力し合うことで、社会実装への道は開かれていくはずです」
「意志のある道具」との関係が人間の
未来に大きく影響する
介護医療の現場で広く活躍する機能と個性を持ったコンシェルジュロボット。現在はその実用拡大に向けて歩みを進めている三枝先生ですが、その視線はさらに先にある未来を見据えています。
「ロボットや機械には、人類を進化させる可能性があると考えています。人は道具を使いはじめた時に大きく進化しましたが、機械やロボットはこれから『意志のある道具』となっていきます。その意志とどのような関係性を築くことができるか、お互いに成長し合えるものとなれるのか。その時が人間の未来を大きく変える転換期になるでしょう」
まるでSF映画のような話ですが、機械の自律性と深層学習の技術が大きく進化するいま、これは決して非現実的な話ではありません。そしてこれは未来のエンジニアや研究者にとって取り組むべき課題となり、社会的にも大きなテーマになることでしょう。
「介護医療コンシェルジュロボットでは身体の動かない人が病室外で活動するためのインターフェースを開発しました。これも人間のひとつの進化に繋がると思いますが、これはまだ『道具としての機械』に拠るものです。人間機械共生研究室と名付けた私たちの研究室で取り組むテーマはその先にあるもの。そのためにも機械と人間が共生する環境づくり、そこでの関係性の追求を、介護医療というフィールドに限ることなく、広く展開していきたいと考えています」